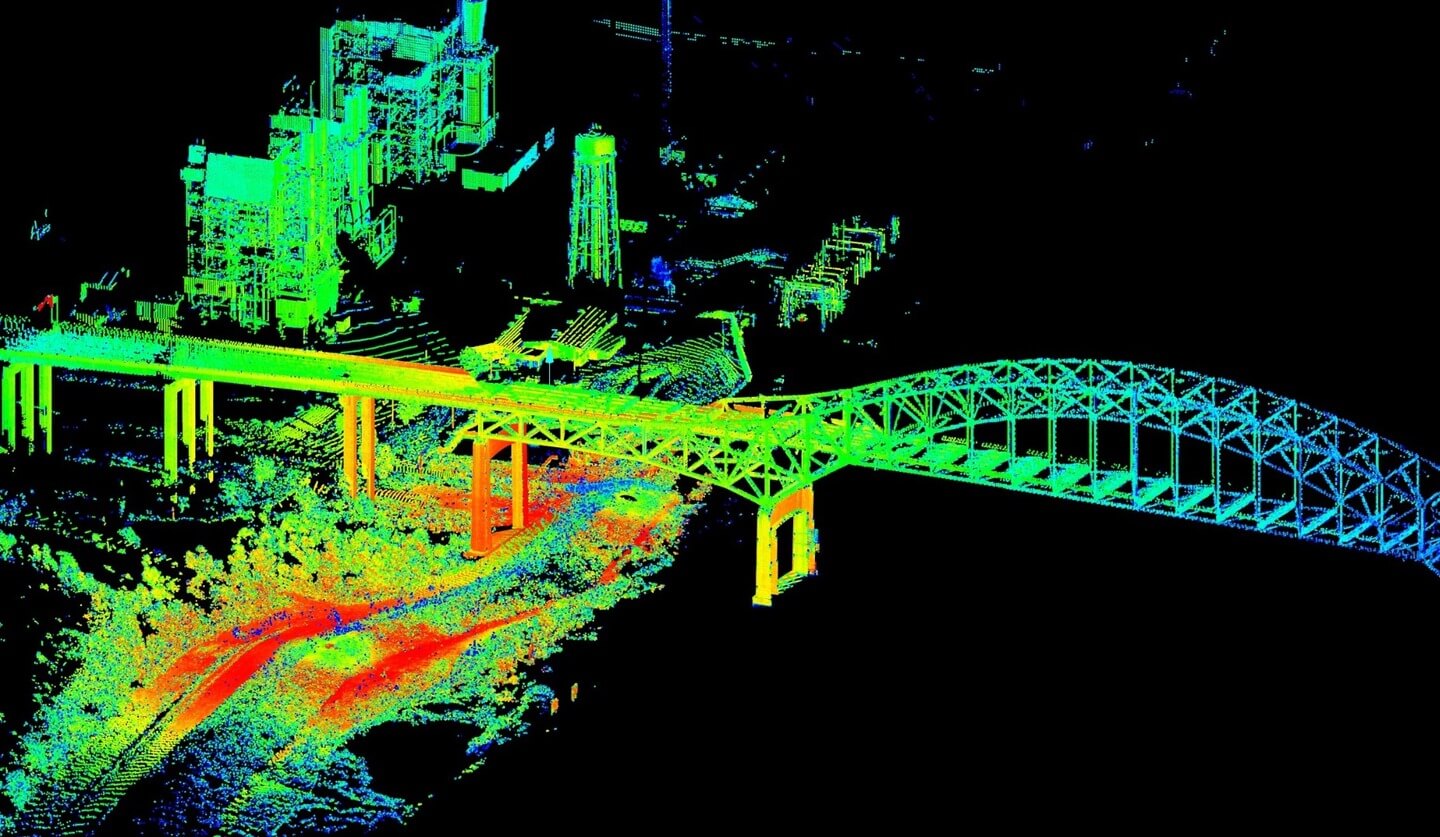
点云数据一般由激光雷达等3D扫描设备获取空间若干点的信息,包括XYZ位置信息、RGB颜色信息和强度信息等,是一种多维度的复杂数据集合。
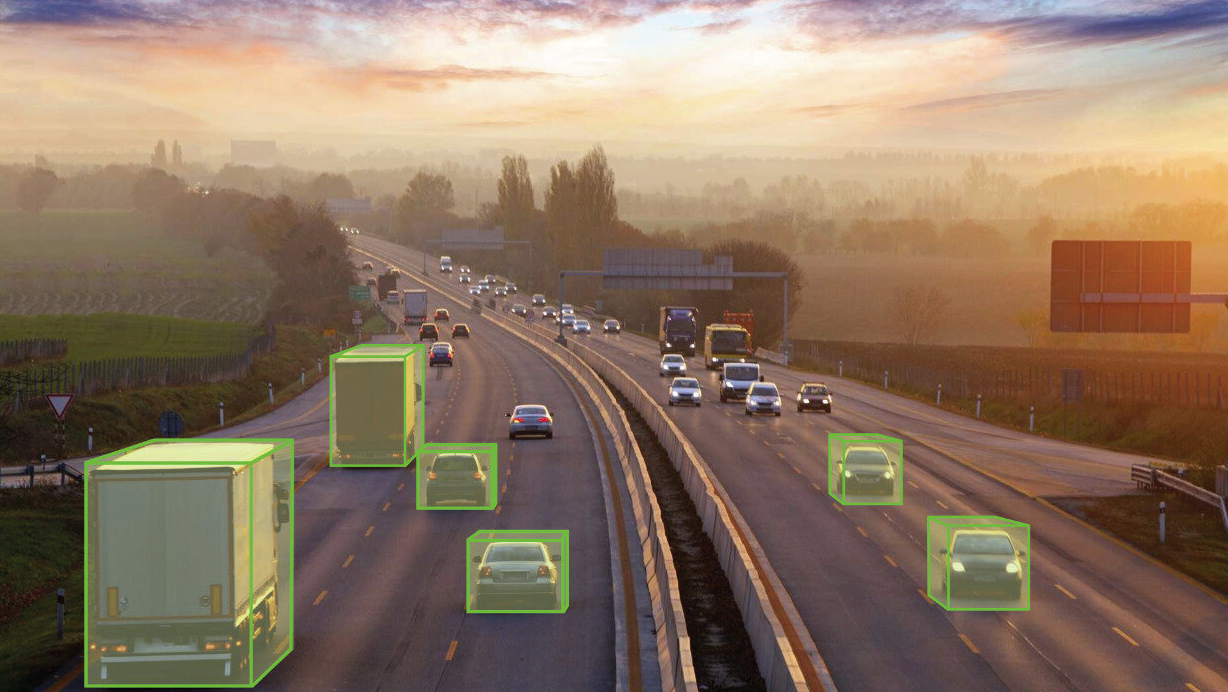
相比于2D图像来说,3D点云标注具有很大优势,它可以提供丰富的几何、形状和尺度信息;并且不易受光照强度变化和其它物体遮挡等影响。因此,3D点云标注能够很好地了解机器的周围环境。
点云连续帧标注:3D点云连续帧标注是自动驾驶场景中应用最广泛的数据处理方法,对三维空间感知能力以及多帧协同处理能力要求较高。
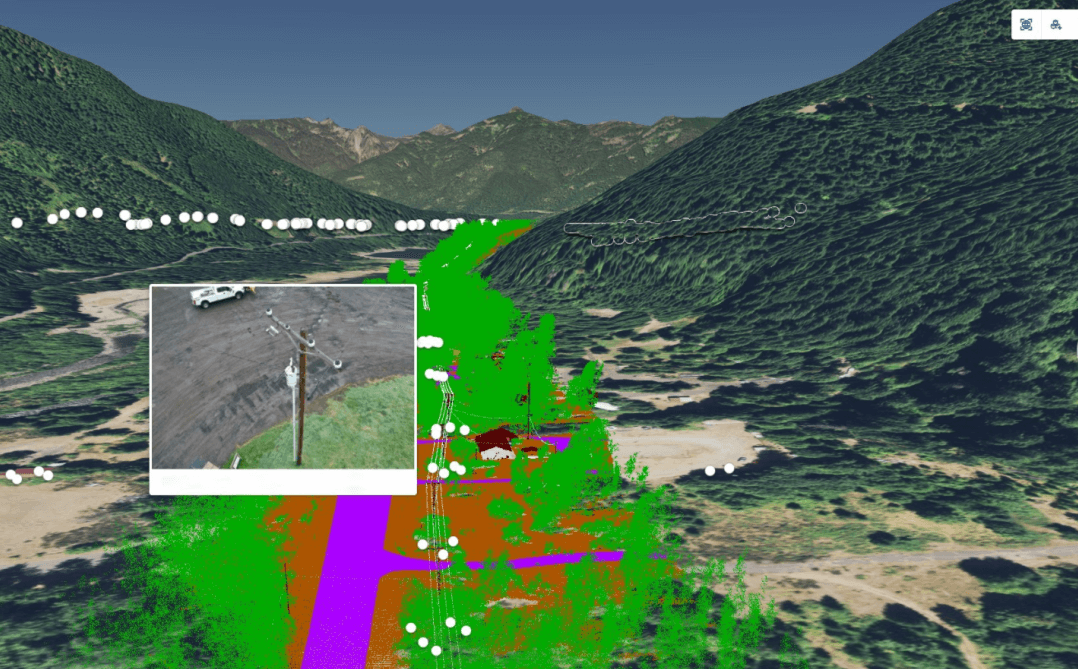
点云语义分割标注:点云语义分割可以将标注对象用立方体框选出来,并将点云染成同一颜色,准确识别出行人、汽车等物体,帮助车辆理解道路环境。
点云可以将原始几何信息保留在3D空间中,而不会进行任何离散化,这一特性也使其社会化应用逐步加深。
自动驾驶汽车中,3D点云语义分割技术能将道路环境点云数据分割并同时进行定位和地图绘制,能够识别出行人、汽车等物体,这对自动驾驶汽车最为有用。
铁路场景检测,3D点云标注能够准确地识别铁路上的异物,在车站站台、隧道口等重要区域进行异物入侵检测能有效地保证高速铁路运行的安全性,且激光雷达不易受到天气及环境的影响,点云技术应用广泛。
上一篇
下一篇
 2022年07月19日
2022年07月19日